像点坐标变换式
像点ɑ在以摄影中心S为原点,摄影主光轴z坐标轴的像空间坐标系(S-xуz)中的坐标为xɑ、уɑ、zɑ=-f。此时以S为原点再建立一个辅助坐标系(S-uvw)其中3个坐标轴u、v、w分别与模型坐标的3个坐标轴X 、Y、Z相平行。ɑ点在此辅助坐标系中的坐标设为uɑ、vɑ、wɑ,则其变换关系式为:
R为旋转矩阵,它是由像空间坐标系与辅助坐标系的相应坐标轴间夹角的余弦(称方向余弦)组成,而这些方向余弦都是像片的3个角定向元素的函数。这是一个重要的基本公式,因为有很多理论公式或作业公式就是在此基础上进一步演化得出的。例如,在解析摄影测量中有广泛应用的“共线条件方程式”,就是根据它的反算式作进一步演化得出。

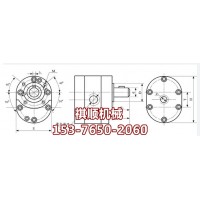
SWDC- 4 宽像幅面阵数字航空相机,在高程精度、旁向视场角、重量体积比、可更换镜头、降低航高等技术指标上取得了突破。采用的大视场角、大象元角、大基高比技术显著地提高了成图效率与高程精度。SWDC进行5000H 飞行时旁向覆盖宽度近9 公里, 航向覆盖近8 公里, 60%重叠时基高比近0.59/0.89。SWDC- 4的作业效率和高程精度都高于DMC等国外数字航空相机, 在进行中小比例成图航空拍摄时, SWDC- 4 具有更高的实用价值。SWDC独有的组件式自供电结构和有无摄影员两种工作方式可以适应各种飞行平台、具有极大的适应性。SWDC- 4 能够进行1 ∶500 到1∶10000 的成图比例尺的航空摄影, 其作业精度远高于国家规范所规定的作业精度, 高程精度达到1/10000 航高。
无人l机导航技术目前使用和采用的导航技术主要有惯性导航、卫星导航、多普勒导航、地形辅助导航和地磁导航。这些导航技术各有利弊。因此,在它导航中,根据它的不同任务选择合适的导航技术是非常重要的。
1.惯性导航。具有不依赖任何外界信息实现完全自主导航、隐蔽性好、不受外界干扰、不受地形影响、可全天候工作等优点。缺点是定位误差是随时间累积的误差,精度受惯性导航系统影响。
2.GPS导航。其优点是全天候、连续、准确的导航定位能力,以及良好的实时性。缺点是易受电磁干扰;GPS接收机的工作受到飞机机动的影响。比如GPS的信号更新频率一般在1 Hz到2 Hz之间。如果飞机需要快速更新导航信息,单靠GPS系统无法满足飞机更新信息的需求。
4.地形辅助导航。其优点是无累积误差,隐蔽性好,抗干扰能力强。缺点是计算量大,实时性受到限制。工作性能受地形影响,适用于起伏较大的地形,不适合在平原或海面上使用;同时也受天气影响,雾天多云天气条件下导航效果不好。要求飞机按照规定的航线飞行,不利于飞机的机动性。
5.地磁导航。地磁导航具有无源、无辐射、隐蔽性强、不受敌方干扰、全天候、全天候、低能耗的优良特性。导航没有误差积累,在跨海制导上有一定优势。缺点是地磁匹配需要存储大量地磁数据;实时与计算机处理数据的能力有关。
6.综合导航
组合导航是指将两个或两个以上的导航系统以适当的方式组合在一起,通过利用它们的互补特性,可以获得比单独使用任一系统时更高的导航性能。除了结合上述导航技术,还可以应用一些相关技术来提高精度,如大气数据系统、航位推算技术等。
以上就是关于航空测量价格来电咨询 瑞测测绘公司lb是什么单位全部的内容,关注我们,带您了解更多相关内容。